UAV နည်းပညာ ဖွံ့ဖြိုးတိုးတက်မှုနှင့်အတူ၊ မြင့်မားသော bandwidth မိုက်ခရိုဝေ့ဖ်ဒေတာလင့်ခ်၏ လိုအပ်ချက်ကိုလည်း မြှင့်တင်ပေးသည်၊ ၎င်းသည် မြေပြင် သို့မဟုတ် ဝေဟင်သို့ပို့လွှတ်သည့်ပါဝါကို ပိုမိုကောင်းမွန်စေခြင်းဖြင့် သို့မဟုတ် လက်ခံသူ၏ အာရုံခံနိုင်စွမ်းကို တိုးမြှင့်ခြင်းဖြင့် မြေပြင်ထိန်းချုပ်မှုအင်တင်နာ၏ လက်ခံခြင်းနှင့် ထုတ်လွှင့်မှုရရှိမှု တိုးတက်ကောင်းမွန်စေသည့်နည်းလမ်းကို ကျွန်ုပ်တို့တွေ့ရှိခဲ့ပြီး ထိရောက်မှုရှိပြီး လေထုဆက်သွယ်ရေးကိရိယာ၏ အလေးချိန်နှင့် အရွယ်အစားကို တိုးမြင့်မည်မဟုတ်ပါ။
Directional communication antenna ကို အလတ်စားနှင့် တာဝေးပစ် UAV ၏ တိုင်းတာခြင်းနှင့် ထိန်းချုပ်ခြင်းတွင် ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုထားသောကြောင့် ၎င်းသည် beam angle range တွင် မြင့်မားသော အမြတ်များ ရှိပါသည်။ အသုံးဝင်သောအကွာအဝေးရှိ စွမ်းအင်ကိုဖြစ်စေရန်၊ ဦးတည်ရာရောင်ခြည်ဖြာထွက်ခြင်းနှင့် လက်ခံအချက်ပြခြင်းဖြင့် အင်တင်နာ၊ စွမ်းအင် dissipation လျော့ကျစေကာ ဂီယာရရှိမှုကို တိုးတက်စေသည်။ သို့သော်၊ ၎င်းသည် ဦးတည်ချက်ထုတ်လွှင့်ခြင်းနှင့် လက်ခံအချက်ပြမှုများ၏ ဝိသေသများဖြစ်သောကြောင့် အင်တင်နာအား လမ်းညွှန်ခြေရာခံခြင်းစနစ်ဖြင့် တပ်ဆင်ရမည်ဟု ဆုံးဖြတ်ထားပြီး၊ ထို့နောက် UAV အတွက် ရွေ့လျားခြေရာခံဆက်သွယ်ရေးကို အသုံးချရာတွင် အသုံးပြုနိုင်သည်။
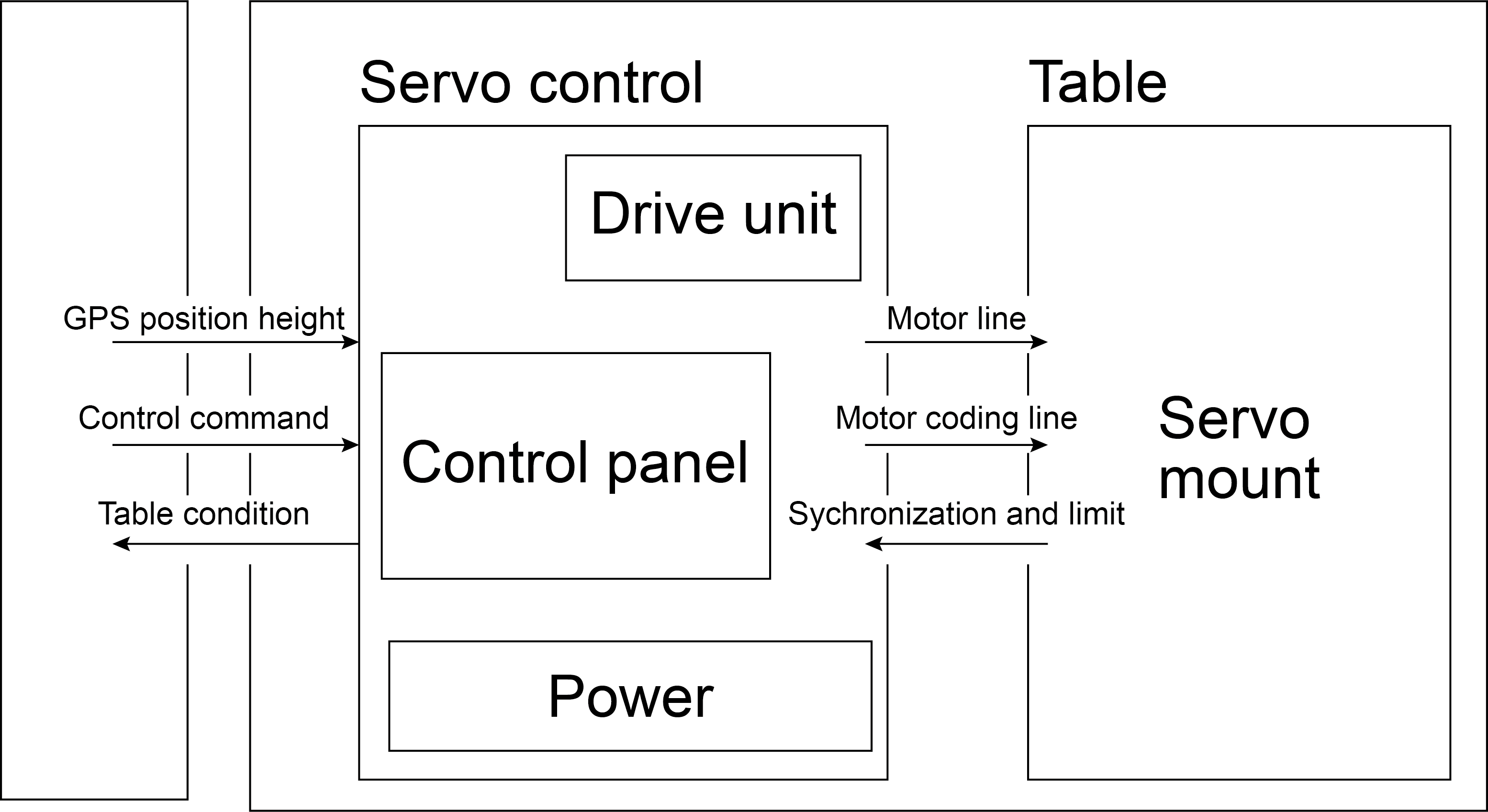
GPS မုဒ်နှင့် brushless servo မော်တာထိန်းချုပ်မှုကို အသုံးပြုခြင်းဖြင့်၊ ခရုပတ်လမ်းညွန်အင်တင်နာ၊ Yagi အင်တင်နာ၊ ဂရစ်လမ်းညွန်အင်တင်နာစသည်ဖြင့် လမ်းညွှန်ချက်ဆိုင်ရာ အင်တင်နာ၏ တစ်ဘက်မြင် servo ထိန်းချုပ်မှုကို ရရှိနိုင်သည်။ ၎င်းသည် single channel monopulse ခြေရာခံစနစ်ထက် ပိုမိုတည်ငြိမ်သည်၊ ဒစ်ဂျစ်တယ်အားကောင်းပြီး ကုန်ကျစရိတ်သက်သာသည်။
ပင်မလုပ်ဆောင်ချက်နှင့် နည်းပညာဆိုင်ရာ အညွှန်းကိန်း
လက်ဖြင့်ခြေရာခံခြင်းနှင့် GPS ဒေတာခြေရာခံခြင်းလုပ်ဆောင်ချက်
လည်ပတ်မှုအမြန်နှုန်း လုပ်ဆောင်ချက်ကို ချိန်ညှိပါ။
azimuth/pitch angle လုပ်ဆောင်ချက်ကို စုဆောင်းခြင်း။
ကိုယ်ပိုင်အလေးချိန်နှင့် ထမ်းပိုး: 3kg/5kg (သယ်ဆောင်ရလွယ်ကူခြင်း)
အင်တင်နာ ခြေခံခုံဖွဲ့စည်းပုံ- အနေအထား-အစေးအမျိုးအစား
လှည့်ပတ်မှု အကွာအဝေး- အနေအထား- 360° Pitch- -10~+45°
လှည့်မှုတိကျမှု- 0.1° လည်ပတ်မှု၏ ဒိုင်းနမစ်ညွှန်ပြမှု တိကျမှု- 0.1°
Rotary လည်ပတ်မှုအရှိန်- 0.1°/s~ 20°/s လှည့်ပတ်အရှိန်- 10°/s2
ပါဝါ: 12VDC/5A
အပူချိန် - 25 ℃ ~ + 55 ℃



















