עם הפיתוח של טכנולוגיית המל'טים, השתפרה גם הדרישה לקישור מידע מיקרוגל ברוחב פס גבוה, היא לא הצליחה לעמוד בדרישות של תקשורת למרחקים ארוכים על ידי שיפור כוח משדר קרקע או מוטס או הגדלת רגישות המקלט, אבל מצאנו שהדרך לשפר את רווח הקבלה והשידור של אנטנת בקרת הקרקע היא יעילה, והיא לא תגדיל את המשקל באוויר ולא תגדיל את המשקל באוויר.
אנטנת תקשורת כיוונית נמצאת בשימוש נרחב במדידה ובקרה של מל'ט לטווח בינוני וארוך, מכיוון שיש לה רווח גבוה בטווח זווית הקרן. אנטנה על ידי קרינה כיוונית וקליטת אות כדי להפוך את האנרגיה לטווח שימושי, פיזור אנרגיה מופחת, לשפר את רווח השידור. אבל, בדיוק בגלל המאפיינים של שידור וקליטת אותות כיוונים, הוחלט שהאנטנה חייבת להיות מצוידת במערכת מעקב הדרכה, ואז ניתן להשתמש בה ביישום תקשורת מעקב דינמית למל'ט.
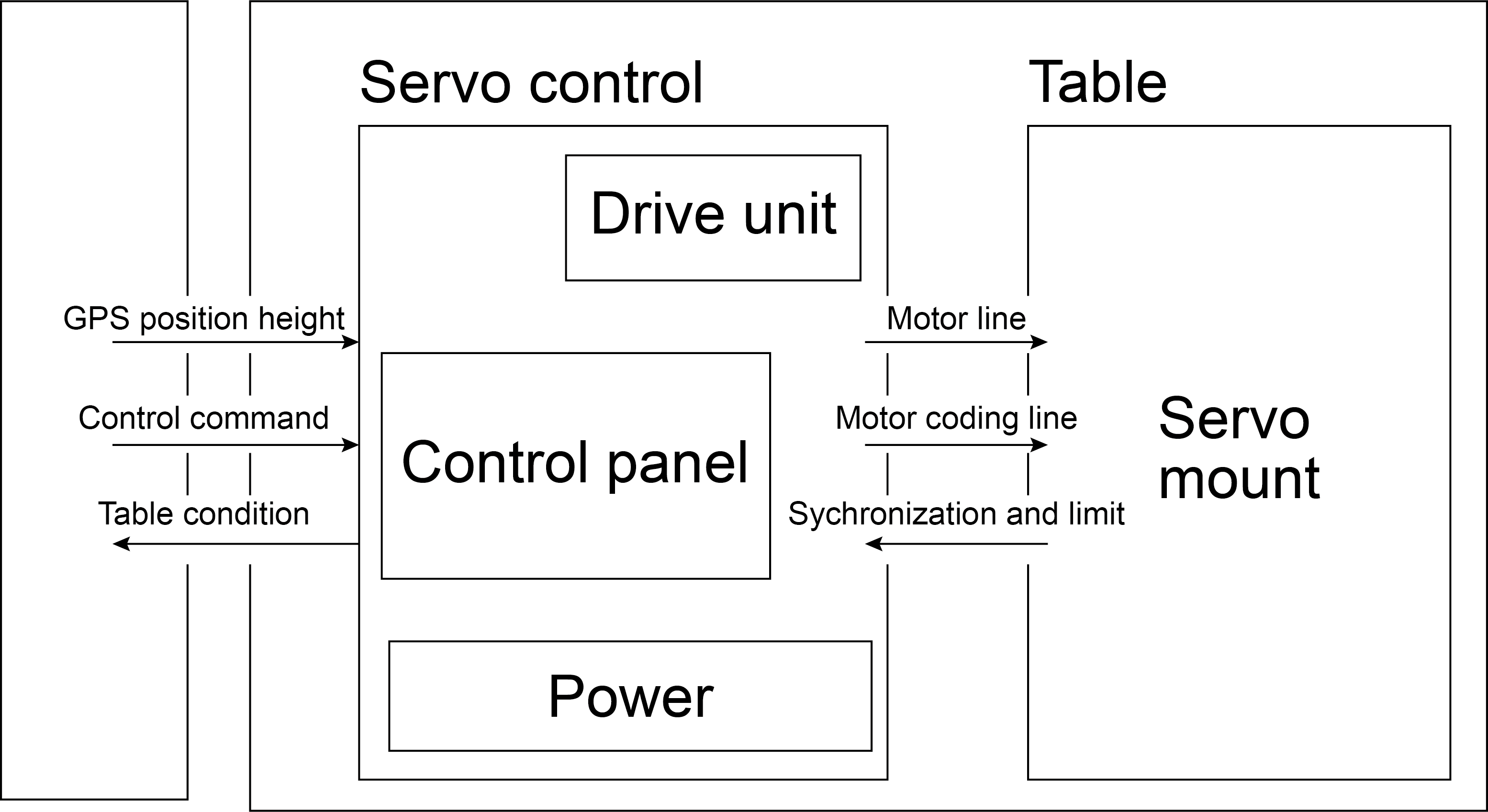
על ידי שימוש במצב GPS ובקרת מנוע סרוו ללא מברשות, השג את בקרת סרוו חד מימדית של אנטנה כיוונית, כמו אנטנה כיוונית ספירלית, אנטנת יאגי, אנטנת כיוונית רשת וכן הלאה. זה יציב יותר ממערכת מעקב מונופולס עם ערוץ יחיד, דיגיטלי חזק יותר ובעלות נמוכה.